

Closed Loop Control mit Frequenzumrichtern
Wir haben ein paar Mal erwähnt, wie closed loop control verwendet wird, um konstante Temperatur, Druck usw. aufrechtzuerhalten, und wie die meisten Laufwerke diese Funktion in das Laufwerk integriert haben, so dass nur wenige externe Komponenten benötigt werden. Schauen wir uns das im Detail an.
Lassen Sie uns zunächst über den Unterschied zwischen offener und geschlossener Regelung sprechen. Wenn wir eine Pumpe verwenden, um den Druck aufrechtzuerhalten, können wir die Drehzahl der Pumpe auf das einstellen, von dem wir denken, dass es die Arbeit erledigen wird, und auf das Beste hoffen und es vielleicht nachts ein wenig herunterdrehen. Dies ist eine Open-Loop-Steuerung.
Eine bessere Lösung besteht darin, einen Druckmessumformer anzubringen und diesen an einen Frequenzumrichter anzuschließen, der den Motor steuert, der die Pumpe antreibt. Der Antrieb vergleicht nun diesen tatsächlichen (d.h. gemessenen) Druckwert mit dem gewünschten Wert (dem Sollwert) und passt die Drehzahl der Pumpe kontinuierlich an, um den Druck auf diesem Niveau zu halten – vorausgesetzt, Sie haben ihn richtig eingestellt. Da die Verbindung vom Drucksensor den Kreislauf vervollständigt (Antrieb – Motor – Pumpenausgang – Wandler – Antrieb), wird das System als geschlossenes Regelsystem bezeichnet und ist in Abbildung 1 dargestellt.
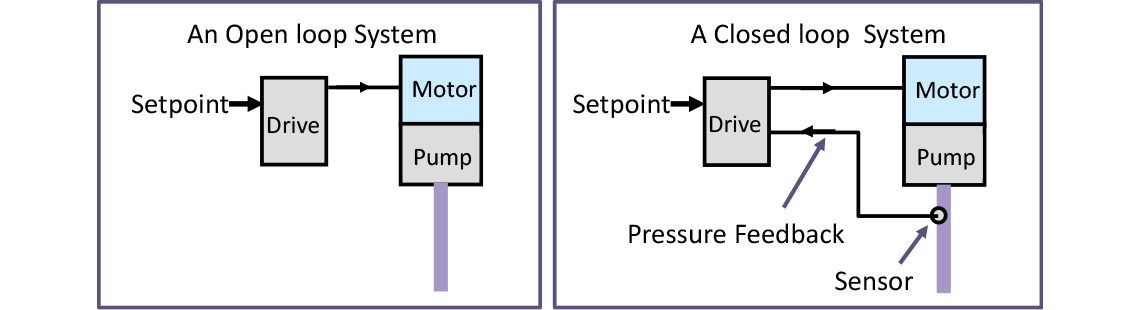
Abb. 1. Offene und geschlossene Regelkreise
Closed Loop Control wird überall eingesetzt, von Flugzeugstabilisierungssystemen bis hin zur Bahnspannungsregelung in Wickelsystemen sowie bei offensichtlicheren Anwendungen, die Druck, Durchfluss, Geschwindigkeit oder Temperatur aufrechterhalten.
Ein Schlüsselthema bei der Regelung des geschlossenen Regelkreises ist die Stabilität. Wenn Sie versucht haben, ein schmales Boot zu steuern, wissen Sie davon; Sie ziehen die Pinne(=Hebel des Steuerruders), nichts passiert; Sie ziehen es noch etwas und das Boot beginnt sich zu drehen. Sie ziehen sich von der Pinne zurück, aber das Boot dreht sich weiter. Du ziehst hart in die andere Richtung und schließlich richtet es sich auf. Sie richten die Pinne auf, aber das Boot dreht sich weiter. Sie oszillieren den Kanal hinunter, bis Sie den Dreh der Verzögerung im System haben. In einem closed loop System kann die Stabilität durch sorgfältige Bearbeitung des Fehlers hergestellt werden. Der Fehler ist die Differenz zwischen dem Sollwert (dem gewünschten Wert) und dem tatsächlichen (Feedback-) Wert. Der Fehler wird auf das Steuerungssystem angewendet – die Pinne (und Sie) auf dem Boot oder den Frequenzumrichter in der Industrie. Auf dem schmalen Boot ist also der Unterschied, wo das Boot zeigt (tatsächlicher Wert) und gerade den Kanal hinunter (Sollwert), der Fehler, und dies sagt Ihnen, dass Sie die Pinne bewegen sollen.
In einer typischen Frequenzumrichteranwendung kann der Sollwert (z. B. Druck) durch einen analogen Eingang oder festen Wert und der tatsächliche Wert durch einen Druckmessumformer, der an einen anderen analogen Eingang angeschlossen ist, eingestellt werden. Der Fehler passt dann kontinuierlich die Motordrehzahl an. Um nun eine gute Kontrolle und Stabilität zu erhalten, müssen Sie das Fehlersignal verarbeiten. Auf dem schmalen Boot lernen Sie bald, die Pinne nicht zu stark zu drehen und Ihre Reaktion auf Fehler zu verlangsamen. Der Frequenzumrichter tut dies, indem er die proportionale Verstärkung und das Integral (gefilterter Wert) des Fehlersignals steuert. Der Differenzwert des Fehlers wird selten verwendet, aber die drei Begriffe Proportional, Integral und Differential ergeben den alternativen Namen für ein geschlossenes Regelsystem. ein PID-System.
Schauen wir uns das genauer an. Wenn wir den Fehler mit einer Konstanten multiplizieren, stellt dies einen Gewinn dar. Wenn diese Konstante ein hoher Wert ist, dann der kleinste Fehler und wir werden die Pinne hart auf dem schmalen Boot schwingen. Eindeutig potentiell instabil. Wenn die Konstante ein niedriger Wert ist, reicht unsere Antwort nicht aus, um den Fehler zu korrigieren.
Wenn wir nun einen "Dämpfungsfaktor" hinzufügen, indem wir den Fehler integrieren, verlangsamt dies die Reaktion des Systems, was auf einem schmalen Boot nützlich ist, wo die Steuerzeiten in Sekunden gemessen werden. Wieder ein zu hoher integraler Term und die Antwort wird zu langsam sein; ein zu niedriger Wert und wir werden wieder oszillieren, da das System unterträgt sein wird.
Wenn wir das Fehlersignal unterscheiden, hilft dies in einigen Systemen, in denen das Überschießen begrenzt sein muss, aber das ist ziemlich ungewöhnlich.
Es ist klar, dass sich die Werte von P, I und D für ein schmales Boot von denen für ein schnelles System wie z. B. die Winder-Bahnspannungsregelung unterscheiden. So ermöglicht unser Allzwecksteuerungssystem innerhalb des Frequenzumrichters die Einstellung von P-, I- und D-Werten, um praktisch jedes geschlossene Regelkreissystem zu stabilisieren. Abbildung 2 zeigt, wie der Fehler in einem typischen PID-System verarbeitet wird.
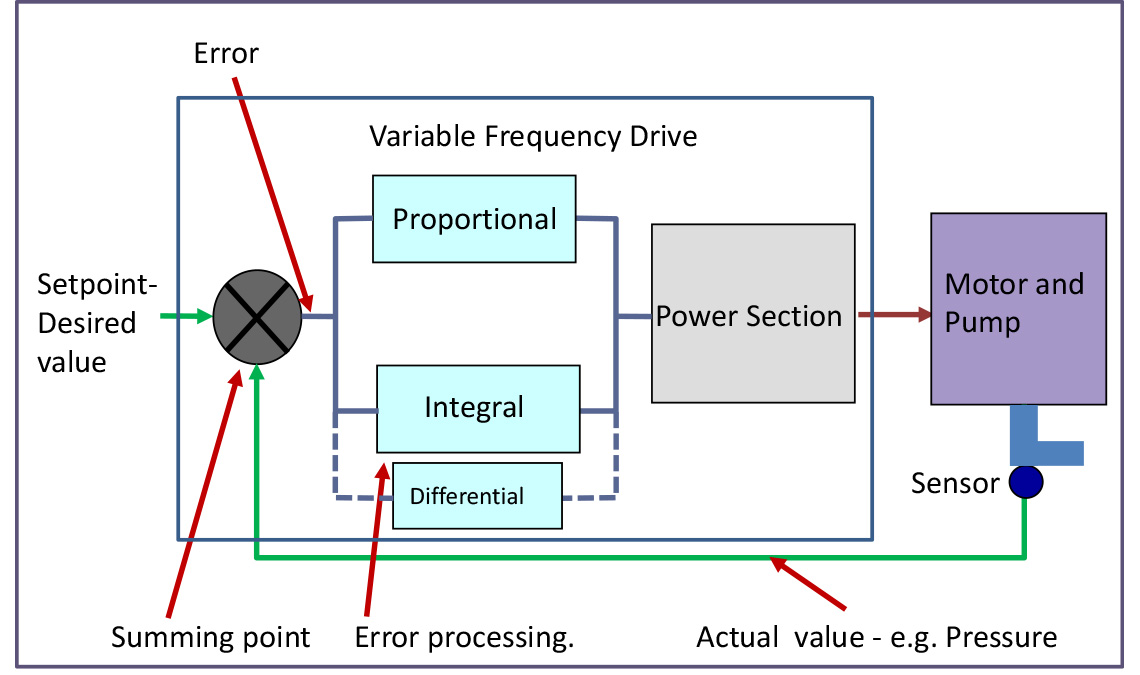
Abb. 2: Verarbeitung von Fehlern
Wie machen wir das in der Praxis mit einem Frequenzumrichter? Wir haben den PID-Regler (oder nur PI-Regler auf E3-Laufwerken) in den Antrieb eingebaut, so dass wir nur einen geeigneten Aufnehmer oder ein Feedback-Signal benötigen, um unsere Variable zu steuern. Wie bei den meisten Ingenieuren, wenn die Grundlagen stimmen, ist der Rest ziemlich einfach. Stellen Sie sicher, dass das Feedback-Signal des Wandlers Ihnen die Werte liefert, die Sie erwarten würden, und dass sich der Motor auf vorhersehbare Weise ändert, wenn Sie ihn beschleunigen und verlangsamen. Führen Sie zuerst die offene Schleife des Systems aus, um dies zu überprüfen. Wenn das Wandlersignal beispielsweise 2,3 bis 5,7 V beträgt, können Sie den analogen Eingang, an den es angeschlossen ist, entsprechend skalieren. Wenn die Wandlerspannung mit zunehmender Motordrehzahl ansteigt, fein; Wenn es fällt (vielleicht arbeiten Sie mit einer Vakuumpumpe), müssen Sie einen Parameter ändern (P-43 auf E3, P3-04 auf P2 und Eco), um dem Laufwerk zu sagen, dass es so arbeiten soll. Sie können auch die Quellen der Feedback- und Sollwertsignale so ändern, dass der Sollwert beispielsweise aus einem festen, gespeicherten Wert stammen kann.
Sobald das Wandlersignal gut aussieht, können Sie die Closed-Loop-Steuerung im Frequenzumrichter aktivieren und sehen, was passiert (P-12 = 5 auf E3, P1-12 = 3 auf P2 und Eco). Es wird wahrscheinlich schön und stabil bleiben und keine Anpassungen benötigen. Wenn es nicht so stabil ist, können Sie versuchen, die P- und I-Terme anzupassen. Wie bereits erwähnt, wird der D-Term normalerweise nicht benötigt. Bei E3-Antrieben werden P und I durch die Parameter P-41 bzw. P-42 eingestellt. Auf P2 und Eco P3-01, P3-02 und P3-03 passen P, I und D an – alle Closed-Loop-Parameter sind P3-XX-Gruppe.
Ein Vorschlag ist, den P-Term zu erhöhen, bis er oszilliert, ihn ein wenig zurückzuziehen und ein wenig I hinzuzufügen. Es ist ein bisschen eine schwarze Kunst, aber weichen Sie nicht zu weit von den Standardeinstellungen ab und lernen Sie durch Erfahrung. Die Steuerung eines schmalen Bootes ist wahrscheinlich schwieriger, aber zumindest können Sie in einem Pub anhalten und Ihre Sorgen ertränken.
Closed Loop Control wird häufig für Anwendungen verwendet, bei denen Temperatur, Druck oder Durchfluss gesteuert werden müssen, aber es gibt viele andere Anwendungen. zum Beispiel die Aufrechterhaltung der Spannung in einem Aufzugssystem, dargestellt in Abbildung 3. Der Tänzerarm bewegt ein Potentiometer, das ein Signal erzeugt, das die Spannung des zu wickelnden Materials anzeigt. Dies wird an den Frequenzumrichter zurückgegeben, der die Geschwindigkeit des Wicklers anpasst, um die Spannung konstant zu halten.
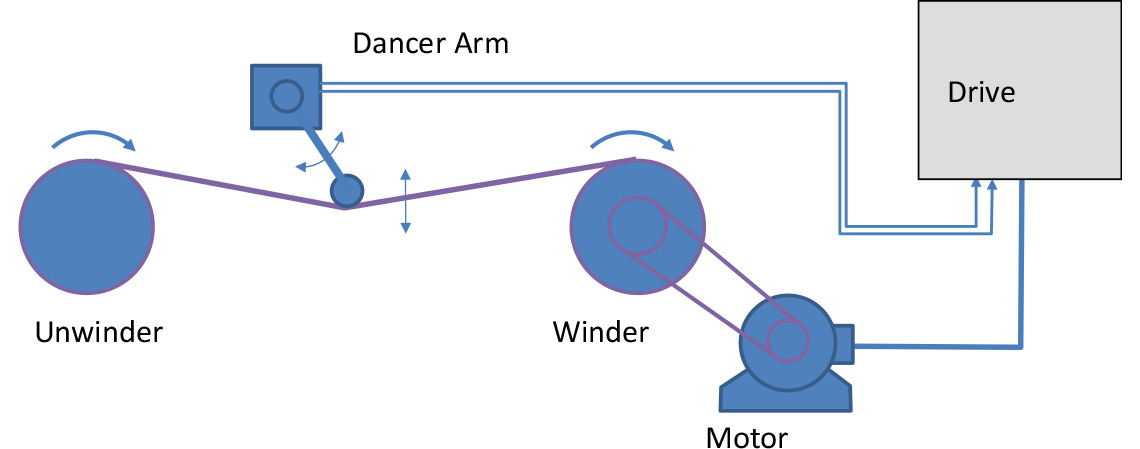
Abb. 3.Bahnspannungsregelung in einer Wicklungsanwendung
Auf Eco- und P2-Laufwerken gibt es mehrere zusätzliche Parameter, die manchmal nützlich sind. Die Rampen können ausgeschaltet werden, um die Reaktion zu verbessern, verschiedene Grenzwerte können festgelegt werden, und wenn es ein Problem wie einen Rohrbruch gibt, kann der Antrieb dies erkennen und abschalten, anstatt mit Vollgas zu laufen und den Ort zu überfluten. Der Eco-Antrieb verfügt über zusätzliche Funktionen wie Kaskadensteuerung und PID-Schlaffunktion. Diese Parameter sind praktische Ergänzungen zu einem vielseitigen Closed-Loop-Controller.
Viele Frequenzumrichteranwendungen arbeiten in einem offenen Regelkreis oder in Verbindung mit anderen Steuerungssystemen, aber für einfache Anwendungen kann sich die integrierte Regelung mit geschlossenem Regelkreis als äußerst nützlich erweisen.